机械臂基础
基础知识讲解
- 机械臂:ELITE模块化协作机器人系列(智能轻型6自由度模块化协作机器人)
- 有效负载:6kg
- 核心功能:
- 配备专用可编程操作界面
- 通过示教器界面实时观察运行状态、进行诸多控制设置
- 支持脱机离线仿真,提升工作效率
- 适用场景:工业制造、科研教育等领域
结构讲解
机器人本体模仿人类手臂结构,包含6个旋转关节(每个关节对应1个自由度),具体组成如下:
- 基座(关节1)
- 肩部(关节2)
- 肘部(关节3)
- 腕部1(关节4)
- 腕部2(关节5)
- 腕部3(关节6)
如下图所示 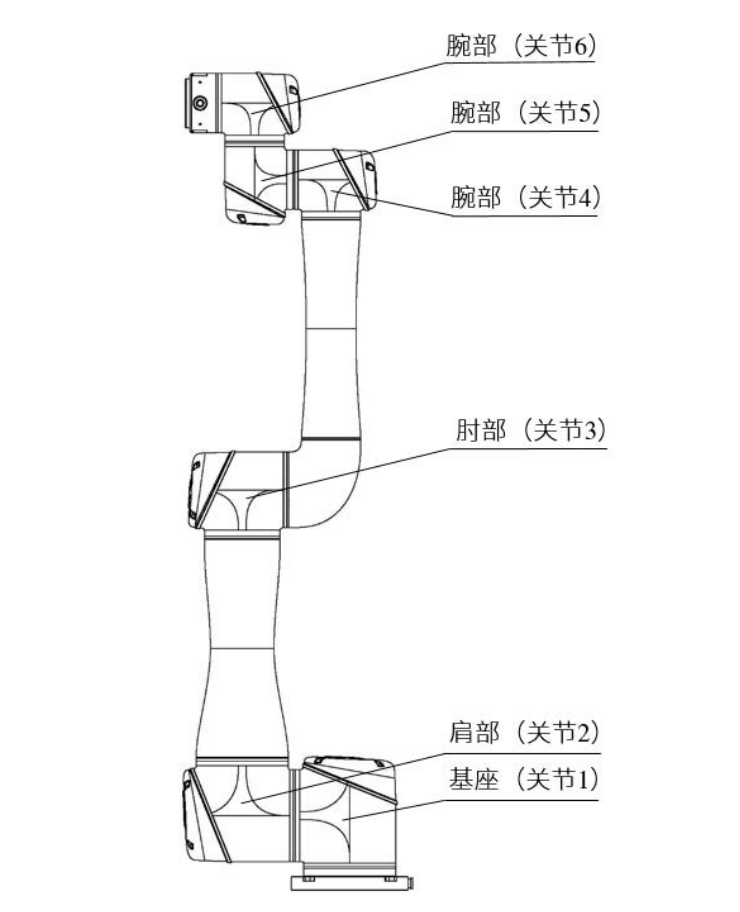
示教器使用说明
示教器正面

以下从急停按钮开始,按逆时针顺序介绍各按钮功能(文档编号:EC):
需点亮,否则机器人无法运行程序
急停按钮
紧急情况或需切断机器人电源时使用。模式选择开关
可将模式设置为自动(PLAY)、示教(TEACH)、远程(REMOTE)模式。⚠️ 注意:从自动模式切换到示教模式时,当前运行的程序会立即终止。
LED指示灯
显示电源状态、报警信息及伺服系统启动情况。状态控制按钮
无需触摸屏,可从状态控制菜单中选择项目。子菜单选择按钮
无需触摸屏,允许用户从子菜单中选择菜单项。功能切换键
用于查看当前屏幕上的高级功能,选择可用高级功能时需按住该按钮。自动(PLAY)模式控制按键
- (a) 橙色按钮V+ / V-:提高或降低运行速度
- (b) 黄色伺服按钮:程序运行前激活伺服
需按下此按钮且黄色伺服指示灯点亮,否则机器人无法运行
- (c) 绿色运行按钮:运行程序、单步执行程序,或移动至已记录路点检查位置
- (d) 红色按钮:暂停程序;1秒内连续按两次可停止程序
轴运动控制按钮
依照当前坐标系移动机器人。滚轮
控制光标移动(默认禁用):- 启用:将滚轮朝示教器方向按下
- 禁用:再次按下滚轮
示教器反面

三位使能开关(图3-12):
用于激活伺服电机,使用要求:- 必须保持按住开关
- 确保伺服指示灯LED点亮
- 模式需设置为示教(TEACH)
其他结构:示教器背面设有触控笔放置处。